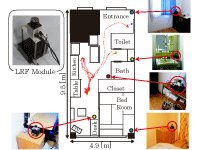
住居内での生活行動の補助・代替等の支援の円滑な実現には居住者の行動の把握,そして行動の予測が必要になると考えられます.そこで,住居内での居住者の行動をセンシングし,蓄積されたデータから食事・睡眠といった居住者の生活行動の開始の予測を行う研究を進めています.本研究では,住居内での居住者の行動は各々特定の範囲での移動の停留を伴うという仮定を置き,時系列での位置の変遷である移動軌跡から,停留行動とそれらを結ぶ移動とに切り分け,各停留行動を分類することによる居住者の住居内での潜在的な行動の連鎖の把握を行います.そして,各行動の切り替わりをイベントとして取得し,対象となる行動とその直前にあるイベント群との相関ルールを学習し,学習ルールに基づく予測を行います.実在の住居に測域センサ(レーザレンジファインダ)を複数設置し,計21ヶ月に亘り取得した実際の移動軌跡データを用いた予測実験により,直前にその行動の準備として移動の存在する行動に関しては高い精度での予測ができることを確認することで,住居内移動軌跡からの居住者の生活行動予測の可能性を示しました.